MERAKIT ROBOT MAINAN
Beberapa contoh kit dibawah ini cukup menarik untuk dijadikan bahan proyek robot sederhana.Dilihat dari harganya cukup " terjangkau " , namun nampaknya baru dijual di situs online seperti Ebay.
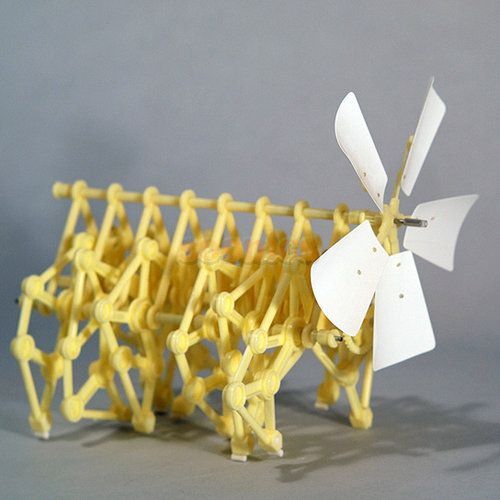
Ada tiga jenis linkage ( sistem pergerakan ) yang sifatnya menirukan kebiasaan cara berjalan mahluk hidup.
Seperti laba-laba , kepiting dan serangga atau diistilahkan sebagai ' gaits '.
Beberapa tokoh yang bekerja dengan linkage system pada gerakan mekanik diantaranya :
1. Theo Jansen
2. Joe Klann
3. Jaimie Mantzel
4. Burmester
Masing - masing sistem memiliki pola pergerakan yang berbeda dan menarik untuk dipelajari.
Umumnya kit mainan ini dibuat menjadi robot sederhana dengan sistem Skid Steering seperti sebelumya
telah dibahas pada postingan lalu. Jadi kita harus memisahkan kedua sisi robot dan masing - masing diberi
motor DC secara terpisah dan dikendalikan oleh rangkaian dual DC motor driver seperti dibawah ini :

www.glacialwanderer.com

www.datasheeto.com

Setelah motor kiri dan kanan di pasang pada masing2 sisi kaki robot , kemudian dihubungkan pada
DC motor driver setelah itu , dapat dihubungkan pada rangkaian mikrokontroler atau ke rangkaian
Receiver remote control. Bisa juga tanpa rangkaian diatas samasekali , cukup dengan kabel dan saklar
dan dikendalikan secara manual.
Jadi langkah awal membuat robot bagi pemula adalah mendapatkan dua buah gearbox motor penggerak berikut rangkaian elektronik dual DC motor drivernya plus sepasang roda.
Tujuannya , agar robot bisa berbelok kiri dan kanan selain maju mundur.
Untuk berbelok caranya dengan cara motor kiri berputar motor kanan diam dan sebaliknya.
Atau motor kiri berputar searah jarum jam dan motor kanan berputar berlawanan arah jarum jam.

Differential Driving
Jadi berbeda dengan cara berbelok mobil mainan remot kontrol yang beroda empat, dimana
satu DC motor kecil di bagian depan berfungsi menggerakkan sistem rack dan pinion untuk berbelok, sedangkan di bagian belakangnya sebuah motor yang lebih besar berfungsi sebagai penggerak maju dan
mundur.Sistem kemudi menggunakan rack dan pinion seperti mobil sungguhan adalah sistem Ackermann.


Apa keuntungan dari sistem skid steering atau disebut juga differential steering pada robot dibandingkan
sistem Ackermann?
Banyak , tapi yang utama adalah kemudahan dalam membuat program pergerakannya.Selain itu radius putarnya kecil bahkan nol , iyalah seperti "balik kanan grak" didalam barisan.
Berikut ilustrasi beberapa jenis pergerakan robot :



diferrential drive. biasa diterapkan pada tank , buldozer. Untuk independent drive memerlukan kontrol
yang kompleks agar sinkron dan tidak saling menarik / bertemu antar roda2nya , biasa ada pada mobil
4WD untuk medan berat.
Berikut contoh kitnya , seperti halnya kit spider dan mobil/tank guling guling
kita gunakan dua buah kit sperti ini , kalau cuma satu ya bisanya maju dan mundur saja :
 |
  |
Tidak ada komentar:
Posting Komentar