Banyak produk jadi yang sudah siap di pasaran , sebut saja Google Fatshark , Quanum dsb. Namun sayangnya harganya cukup mahal untuk ukuran saya. Harga produk jadi berkisar 1 juta sampai 5 jutaan atau lebih. Dalam blog ini saya hanya menghimpun berbagai karya home made buatan orang lain yang saya coba buat sendiri .
Inilah penampakan produk built in dari Fatshark

Yang dibawah ini Quanum , berikut On Screen Display ( OSD ) dlm layar LCD nya

Langsung saja bikin copy nya dengan petunjuk dari berbagai situs :
Pertama siapkan styrofoam tebal bekas packing barang atau ikan.
Kedua potong dan sesuaikan dengan besar layar LCD dan buat lengkungan agar cocok dikenakan di wajah
caranya gunakan lingkar depan pada bagian topi sebagai polanya.
Ketiga , tentukan panjang styrofoam berdasar lebar layar dan kenyamanan mata kita. Tiap orang memiliki fokus penglihatan yg berbeda , juga bagi yg berkacamata tentu berbeda juga panjang fokusnya.
Keempat , pasang tali strap elastik seperti pada headlamp tempelkan dan gunakan potongan triplek , lem bakar dan sekrupkan pada styrofoamnya.
Kelima , pasang Receiver 5.8 Ghz , antena dan baterai Lipo 1000 - 1300mAh 3s diluar casing styrofoam dan hubungkan ke layar LCD kemudian letakkan LCD dalam casing styrofoam yang telah kita buat tadi.
pasang lensa baca kotak didepan layar LCD dengan pembesaran 3x atau gunakan lensa Fresnel ukurannya disesuaikan lebar LCD yang kita gunakan.
Lensa Fresnel biasa dijual online bentuknya lembaran mika , ada yg berukuran sebesar kartu ATM hingga selebar kertas Ukuran A4. Fungsinya sama seperti lensa cembung yakni memperbesar bayangan objek.
Lensa Fresnel juga membuat backlight dari LCD tersebar merata sehingga mengurangi silau pada mata.
Kualitas gambar lebih baik jika menggunakan lensa baca yang bentuknya kotak dengan pembesaran 3x.
Berikut sedikit gambar dari situs rcgroups yang menampilkan anatomi FPV googles :


Cukup bikin dari styrofoam bekas seperti dibawah ini , untuk lensa fresnel ukuran kartu bisa cari di situs online atau di Tokopedia , tinggal ketikkan lensa Fresnel di kolom pencarian aja : )

.

Cara lain pakai foam jenis Depron seperti bahan foam pada kemasan makanan , tapi ini versi yang tebal.
Biasanya dijual sebagai media tempel poster promosi atau banner . Tebalnya antara 2 sd 6 mm.
Buat pola sesuai ukuran layar LCD , tentukan jarak lensa fresnel dan dilem dengan lem bakar atau pakai
lem putih Fox juga bisa. Lapisi dengan lakban bening , jika perlu beri penguat bambu tusuk sate.
Dibawah ini 2 foto dari situs instructables , menunjukkan pola untuk box monitor LCD nya.




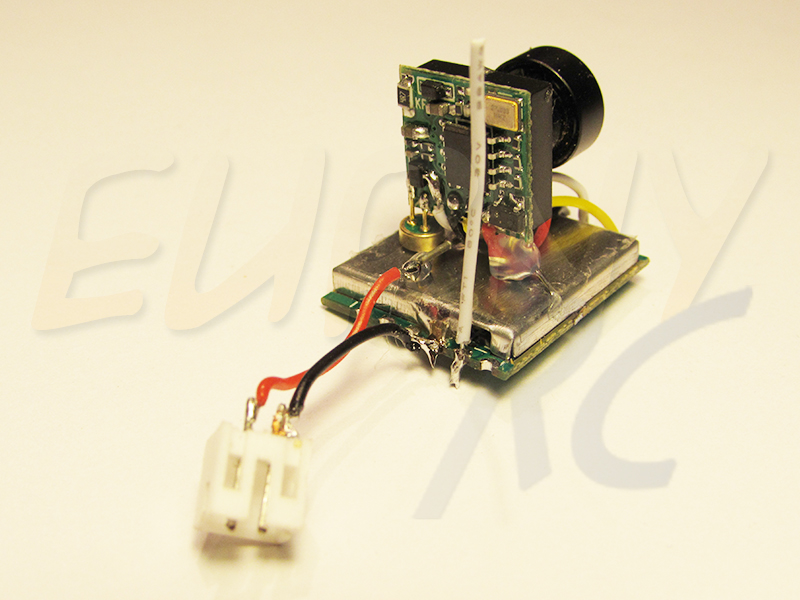
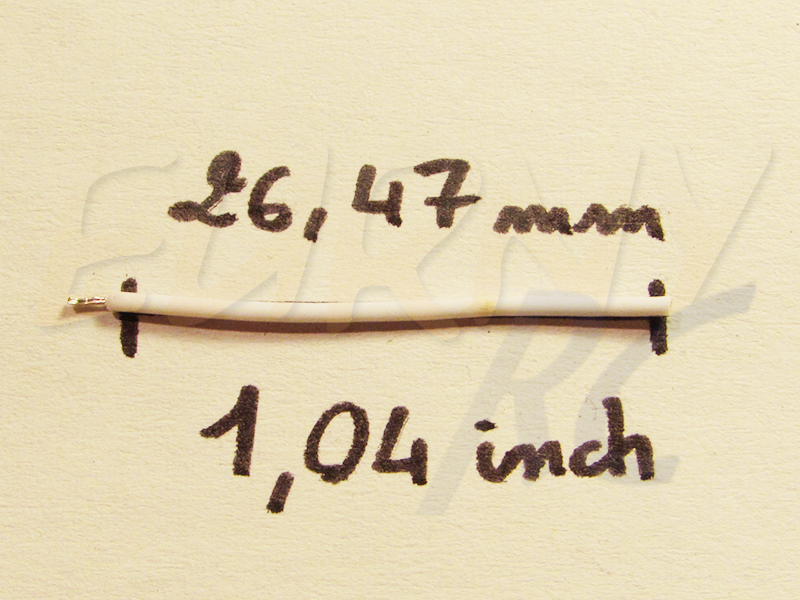
Saya sudah test layarnya Ok , tinggal ujicoba kamera FPV nya. Saya gunakan baterai Lipo 3.7 volt untuk
kamera FPV di moncong pesawat , baterai Turnigy Nano Tech T1 Single Rail 160mAh.
Sayangnya sulit mencari konektor baterai jenis ini. Meski baterai ini dipakai untuk produk Nine Eagles tapi
tak banyak yang menyediakan battery holder tipe ini. Biasanya dijual jadi satu sama skid RC helikopter mini.
Alhasil terpaksa disolder ke konektor JST atau molex yang umum di pasaran ,supaya mudah dilepas pasang.
Jangan lupa sesuaikan bagian bawah dengan coakan untuk batang hidung. Selanjutnya casing styrofoam bisa dilapisi cat dinding dengan pengencer air. Warnai hitam di bagian dalamnya , agar cahaya bisa terserap dan juga mencegah cahaya luar masuk ke dalam casing nya.
Siapkan monitor LCDnya , saya menggunakan monitor 4.3 Inch , tapi jika ada dana lebih , gunakan layar yang memiliki spek " No Blue Screen " , maksudnya gambar tetap tampil meski sinyal dari pemancar lemah , dan tidak berubah jadi " Blank atau biru " layar LCD nya.
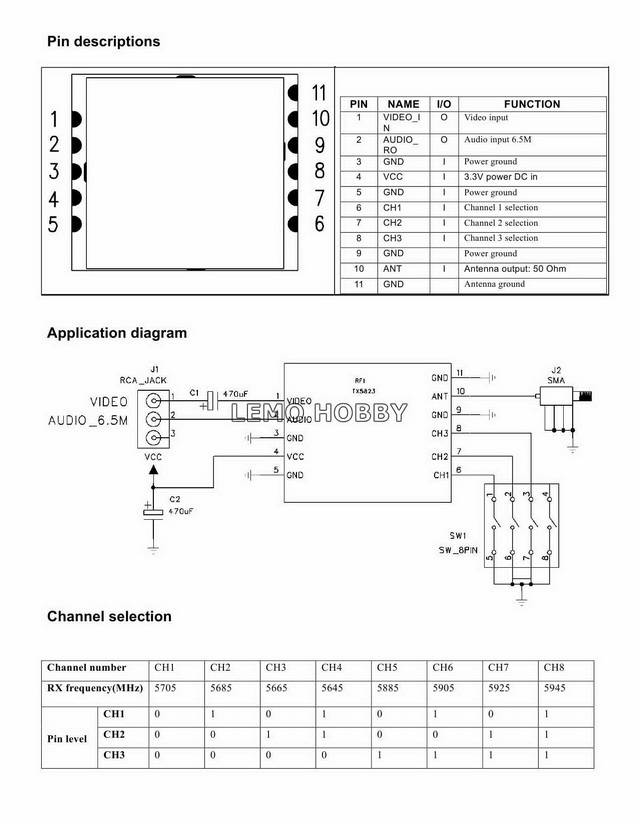
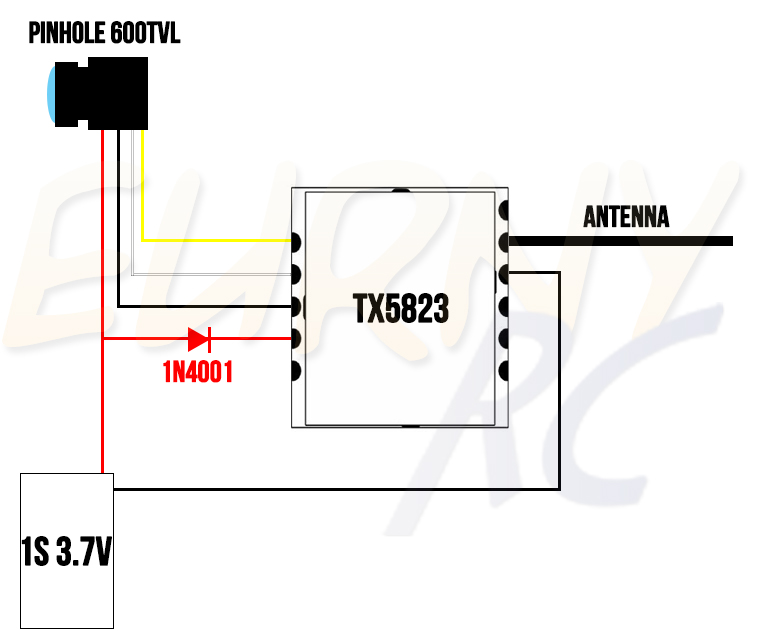
Untuk bagian pemancar ( Tx ) 5.8 Ghz , saya gunakan sistem DIY dari artikel sebelumnya.
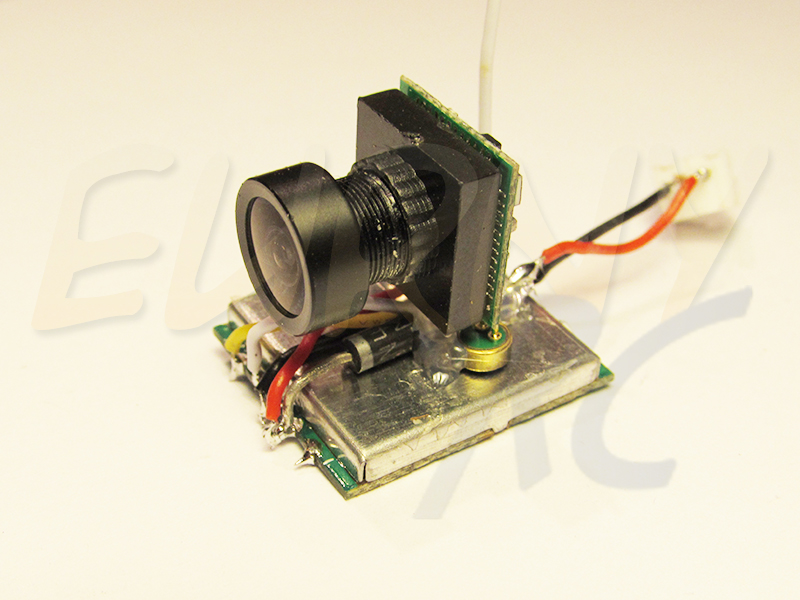
Perhatikan pada bagian Tx , antena standar 5.8Ghz dibongkar dan diambil kabel coaxial nya saja dan disolderkan pada modul Tx langsung tanpa menggunakan konektor RP-SMA .
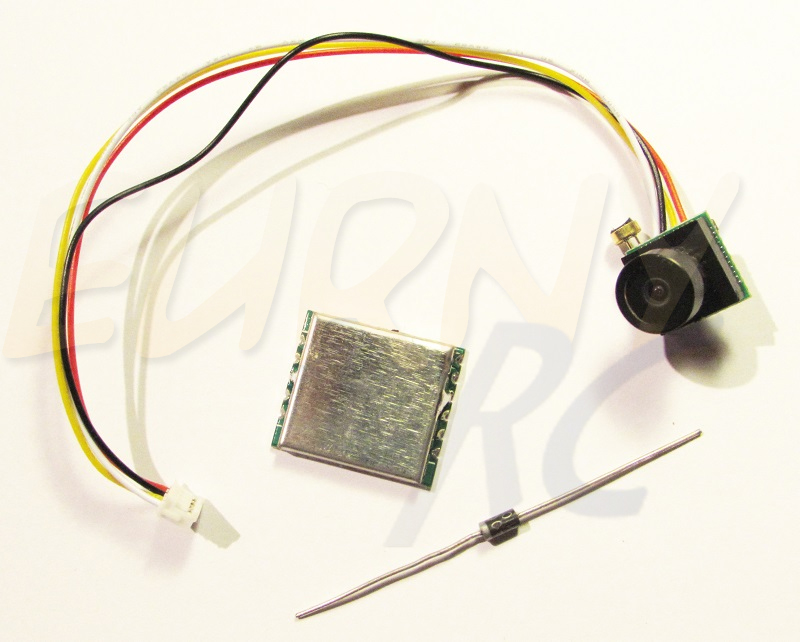
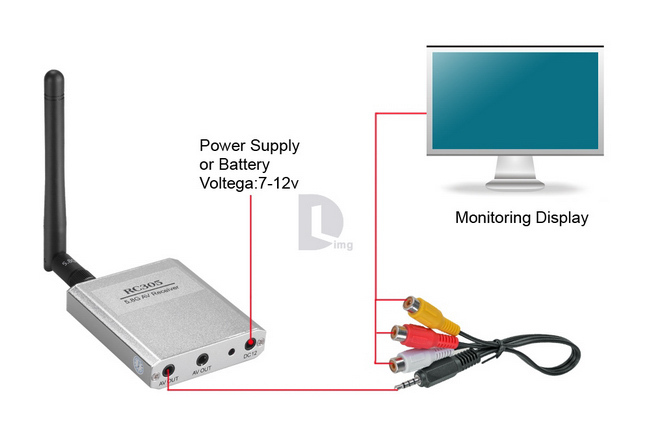
Sedangkan pada modul Receiver ( Rx ) RC305 yang kotak silver itu antenanya bisa diganti menggunakan clover antena supaya lebih baik penerimaan sinyalnya. Lebih baik lagi jika keduanya menggunakan antena clover , hasilnya pasti bagus. Hanya untuk ukuran model pesawat RC yang berukuran mini , setup seperti gbr dibawah akan sangat mengurangi berat / payload pesawat.

Baiklah kita lanjutkan lagi ya , dibawah ini adalah diagram yang
menunjukkan pembesaran bayangan objek dari layar monitor ke mata pengamat via lensa Fresnel.
Penempatan lensa di depan monitor LCD jarak fokusnya berbeda untuk tiap orang , tergantung kondisi
mata masing masing . setidaknya sekitar 3.5 inci dari layar LCD ke lensanya.
untuk pengguna kacamata minus / plus cocok memakai sistem model seperti ini , sebab untuk model yang
lain , sistemnya berbeda dan biasanya sulit bila hendak dipakai bersama kacamata.